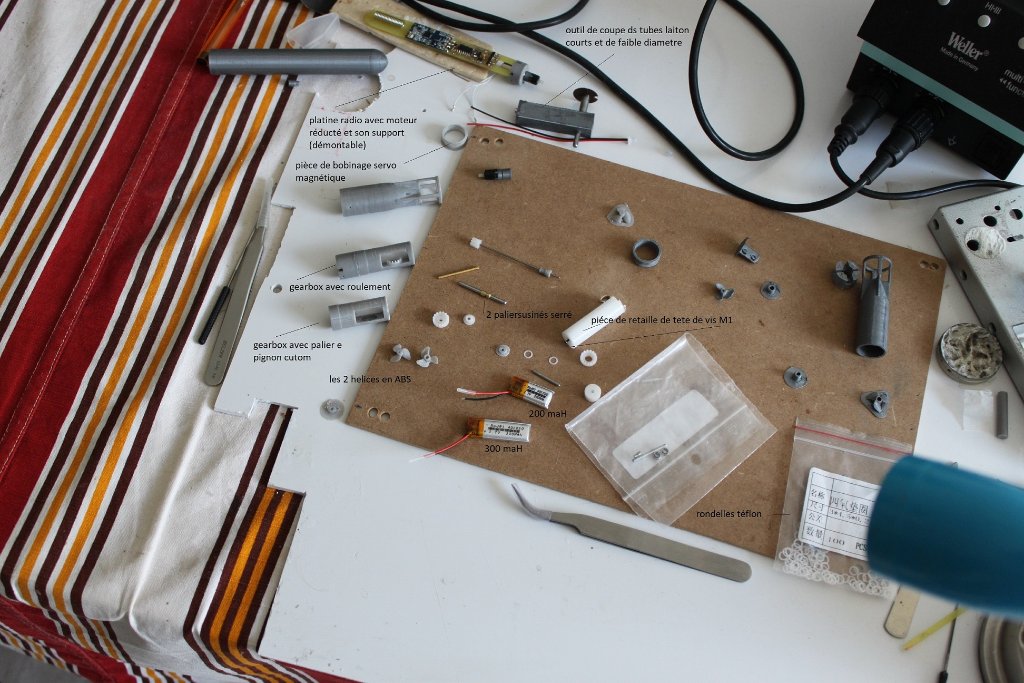
LE MONTAGE
- parts1.jpg (189.74 Kio) Vu 66099 fois
Devis de poids et coefficient de friction
- devis_poids.jpg (108.06 Kio) Vu 66081 fois
CONTRAINTES MECANIQUES
- L'accu doit fournir suffisamment de puissance pour une tension stable avec une vitesse de propulsion suffisante
Pour s'en assurer il faut mesurer la consommation hélice dans l'eau par exemple 800 mA/3.7V
On utilise une alimentation stabilisée de laboratoire avec Voltage et Intensité réglables (V= constante et Imax)
Ensuite, accu chargé, faire une courbe de décharge Y=volts X = temps
On utilisera une résistance de décharge R = 3.7/I
avec I = intensité mesurée du moteur dans l'eau à 3.7V
La courbe doit maintenir un plateau stable et suffisamment long à la tension nominale (3.7V) d'une lipo.
Si la tension s'effondre rapidement l'accu est en surcharge. Cela provoquera des erreurs dans le circuit radio et des reset du microcontrôleur.
- On ne peux placer aucune masse métallique ou accu sous l'antenne. Cela provoquerait (si accu) une résonance proche de celle d'une petite lipo
(environ 60 mHz mesuré au VNA), une modification de l'impédance et une perte d'accord du circuit d'antenne.
On placera donc un bac imprimé 3D avec du sable de quartz dedans.
L'accu relié à la masse et placé sous le plan de masse du circuit ne modifie pas l'impédance de l'antenne mais augmente son gain
(mesuré au VNA)
- La poussée d'Archimède doit rester supérieur au poids total et l’arrière ne doit pas couler
voir figure ci dessus pour les combinaisons possibles
L'arrière sera en ABS imprimé à 20% nid d'abeille hauteur de couche 0.12mm vitesse 20 mm/s
tube alu 2.38mm pour l'arbre rotatif axe inox 1mm pour l'arbre contrarotatif paliers téflon
- Éliminer au maximum les frottements de transmission:
j'ai mesuré un rendement réduit de moitié avec une transmission mal conçue, avec augmentation de I et chute de Vlipo
voir figure ci dessus les coefficients de frottement
acier imprégné avec de la graisse sèche PTFE (Téflon) en Spray donne un coefficient de frottement statique
63 fois plus faible que notre traditionnel acier/palier-laiton graissé !
Les paliers d'axe seront donc en tube PTFE haute température et graissage au spray PTFE WD-40
Cependant après impression et test les paliers PTFE niveau axes/boite ABS ne fonctionnent pas bien.
Je les ai remplacés par des roulements beaucoup plus précis car le PTFE se déforme et ne peut pas être collé.
CONTRAINTES ELECTROMAGNETIQUES
documents de référence
https://www.researchgate.net/publicatio ... resh_Water
https://www.researchgate.net/figure/Att ... _260850687
https://www.robkalmeijer.nl/techniek/el ... index.html
- EM_constraint.jpg (95.74 Kio) Vu 66076 fois
Il s'agit d'étudier comment se propage l'onde radio fréquence (RF wave)
On distingue la perte en transmission, c'est à dire au passage de l'interface air/eau
et la perte en propagation, c'est à dire sous l'eau.
Les 2 premiers documents utilisent le modèle Debye qui est un modèle complexe, le troisième un autre mode de calcul qui n'est pas décrit.
Pour ce dernier on aurait 88 dB de perte totale en 433 Mhz et 46 dB en 41 c'est à dire pas de signal
Or nous naviguons bien en 41 sous l'eau et le 433 marche aussi.
Nous allons donc nous intéresser aux deux premiers.
Vous voyez que la propagation à 433 mhz en eau de ville ou de lac est entre 16 et 18 dB/m soit inférieure à 2 dB quand la torpille
affleure la surface (<= 10cm) soit pas plus de 6 dB de perte en ajoutant l'interface air eau.
Et surtout, et là c'est vraiment notre chance, la longueur d'onde à 433 Mhz dans l'air et dans l'eau ne change que de 5%
A 41 mhz le 1/4 d'onde = 1.8 m dans l'air et 4 fois moins dans l'eau. L'accord de nos récepteurs calculé dans l'air est donc faux sous l'eau.
Le second document explique comment faire la mesure sous l'eau avec un VNA en 433 Mhz et vous voyez que les points de résonance air et eau sont très proches.
(En corrigeant l'accord de la version 72 et avec une antenne de même taille j'ai calculé plus de 32% de rendement antenne dans l'eau au lieu des 3% actuels.)
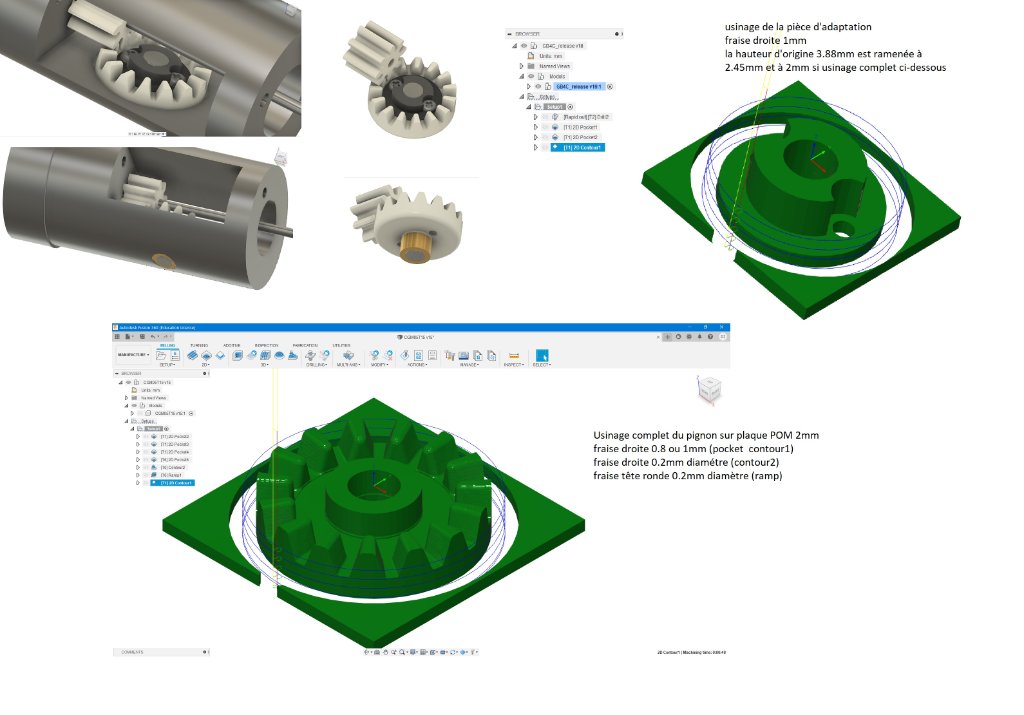
La combinaison retenue avec pignons coniques laiton ou couronne nylon.
Le nylon est vraiment plus léger, le module 0.5 laisse plus de marge que le 0.2 et nous n'avons qu'un axe de réglage:
monter/descendre la couronne au lieu de 3 avec les pignons coniques.
Par contre nous avons peu de hauteur disponible sous la couronne et elle doit être bien horizontale.
L'idéal serait le module 0.4 mais introuvable en petite couronne nylon ou POM.
J'ai commandé du matériel pour taille de pignons/couronne M0.4 sur mesure, ce sera un autre thread; pour le moment test avec le M0.5

- RCTV4B.jpg (60.67 Kio) Vu 66070 fois
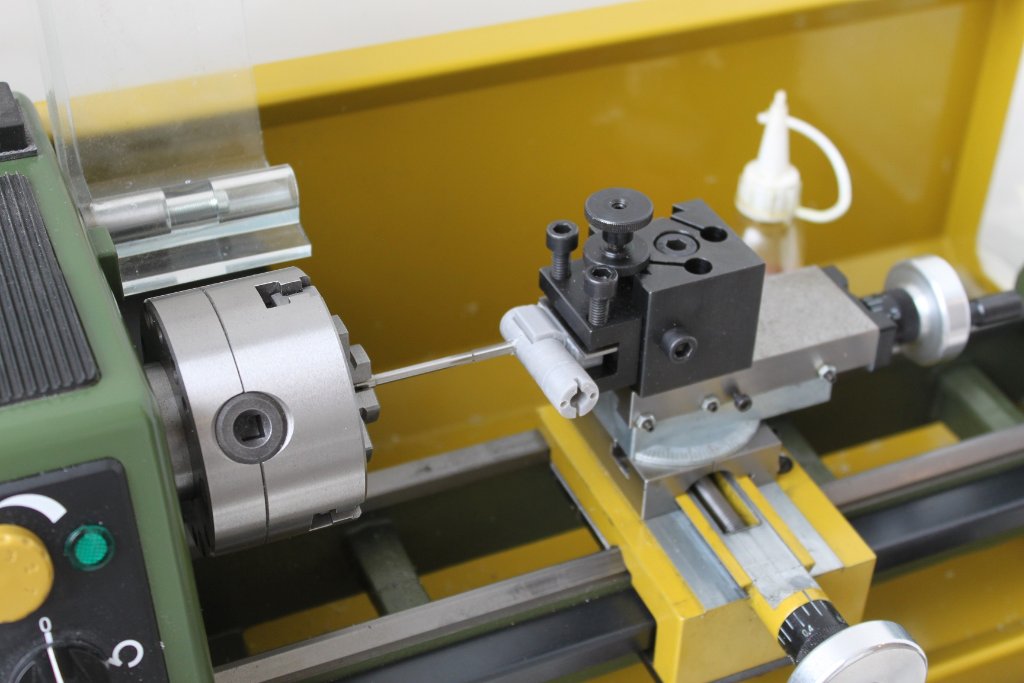
Pour la suite, un petit tour précis est indispensable ainsi qu'un jeu d'alésoirs, des équarrissoirs d'horlogerie et un jeu de limes de formes diverses.
Le montage est difficile sans le tour, c'est de la micro mécanique d'horlogerie. L'impression 3D est imprécise sur la taille des trous et
sur les diamètres extérieurs. Il faudra rectifier les axes et surfaces externes.
PLA et ABS se tournent bien à la main ou à vitesse lente mais se brident mal.
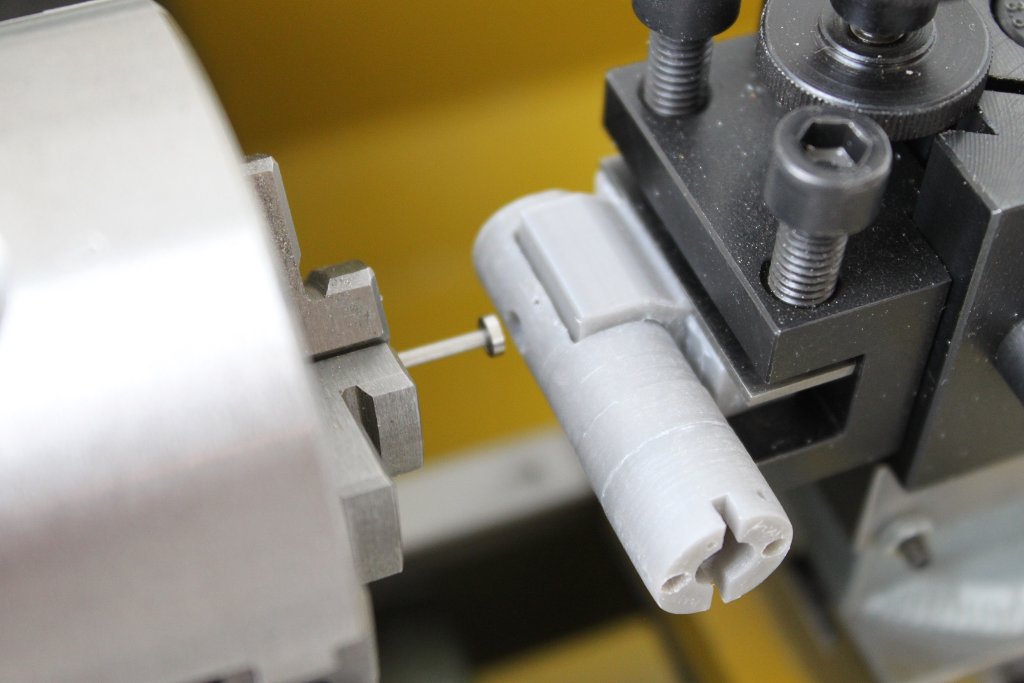
Il va falloir fabriquer des pièces de bridage en particulier pour tailler en biseau la pointe de l'axe du moteur de 75/100 à 47/100mm
pour engagement de celui-ci dans le réducteur planétaire
Cependant après essai le montage avec de la version sur roulement est assez délicate
J'ai trouvé ce pignon kyosho dont la forme est idéale.
Un seul plan de support avec rondelle teflon et beaucoup plus de place sous la couronne.
Il est cependant coûteux et difficile à trouver et le trou central est difficile à réusiner car il est constitué d'un plastique qui s'éfritte.
- RCT23.jpg (28.22 Kio) Vu 66059 fois
Voici donc une "customisation" du pignon C152A M0.5 pour reduction de la hauteur et suppression de la partie sous le plateau
La pièce d’adaptation a été usinée sur plaque POM 2mm et vissage vu qu'on ne peut pas coller le POM.
- CG01.jpg (83.77 Kio) Vu 66047 fois

- CG02.jpg (110.55 Kio) Vu 66047 fois
réalésage
- LT01.jpg (99.82 Kio) Vu 66062 fois
coller le roulement à la cyano
- LT02.jpg (83.75 Kio) Vu 66062 fois
taille de l'axe des moteurs 6mm passe de 0.75mm à 0.47mm biseautage sur meule en carbure de Silicium
Bague de bridage de l'axe en laiton usinée trou 0.75mm

- LT03.jpg (79.3 Kio) Vu 66062 fois

- LT04.jpg (80.89 Kio) Vu 66062 fois
- part2.JPG (169.8 Kio) Vu 66047 fois